Die Bearbeitung großer Teile mit einer mobilen Werkzeugmaschine führt zu erheblichen Einsparungen an Zeit, Energie und Transportkosten, die dadurch entstehen, dass statt des schweren Teils eine kleine und leichte Maschine bewegt wird. Die mobile Werkzeugmaschine, die am Korea Institute of Machinery & Materials (KIMM) entwickelt wird, kann daher leicht zum größeren Werkstück transportiert werden und ist in der Lage eigenständig entlang der Werkstückoberfläche zu kriechen. Dies ermöglicht eine flexible Bearbeitung großer Teile bei reduzierten Kosten.
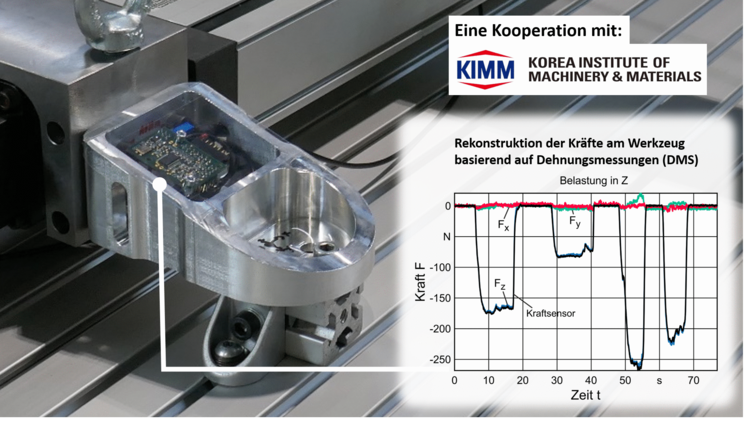
Aufgrund der kleineren und leichten Struktur mobiler Maschinen sind Steifigkeit und Genauigkeit im Vergleich zu Werkzeugmaschinen jedoch reduziert. Insbesondere müssen Verschiebungen durch das Eigengewicht der Maschine bei unterschiedlichen Achspositionen sowie auftretende Prozesskräfte berücksichtigt werden. Maschinenintegrierte Konzepte zur Kraftmessung für eine Verlagerungskompensation wurden erfolgreich am IFW als kraftmessender Spindelhalter und als sensorische Maschinenstruktur demonstriert. Nun wird diese Kompetenz eingesetzt, um gemeinsam mit dem KIMM eine maßgeschneiderte Sensorlösung für die mobile Werkzeugmaschine zu entwickeln.
Kompensation von Verschiebungen des Werkzeugmittelpunktes
Ziel des Projektes ist die Entwicklung ein Sensorsystem zur Kompensation von Verschiebungen des Werkzeugmittelpunktes einer mobilen Werkzeugmaschine unter Berücksichtigung des Eigengewichts, der Prozesskräfte und einer Überlasterkennung. Das System besteht aus Dehnungsmessstreifen an den Vakuumfüßen der Maschine, einem Modell zur Rekonstruktion der aus den Dehnungsmessungen resultierenden Kräfte sowie einem analytischen Modell zur Vorhersage der Verschiebung aus den berechneten Kräften.
Erste Messungen zeigten, dass die vom System vorhergesagte Verlagerung eine hohe Korrelation in Z-Richtung für eine Belastung in der gleichen Richtung zeigt. Die Verlagerung des Werkzeugmittelpunktes konnte mittels des Sensorsystems auf 430 µm vorhergesagt werden. Ein separates Laserinterferometer ermittelte zur Validierung den tatsächlichen Wert von 450 µm. Durch die Rückführung der Vorhersage ist es nun möglich die Position der Werkzeugspitze zu korrigieren und den Positionsfehler um 95% zu reduzieren.
Institut für Fertigungstechnik und Werkzeugmaschinen (IFW), Leibniz Universität Hannover
www.ifw.uni-hannover.de
Institut für Fertigungstechnik und Werkzeugmaschinen (IFW), Leibniz Universität Hannover
An der Universität 2
D-30823 Garbsen
Telefon: +49 511 762 – 18294
www.ifw.uni-hannover.de



















{kind=link}