


Sie beschäftigen sich mit „Multi-Objekt-tracking mit gleichzeitiger Zustands- und Existenzschätzung unter Verwendung von Random Finite Sets“, heißt es auf Ihrer Homepage. Übersetzen Sie uns das bitte, Herr Professor Reuter.
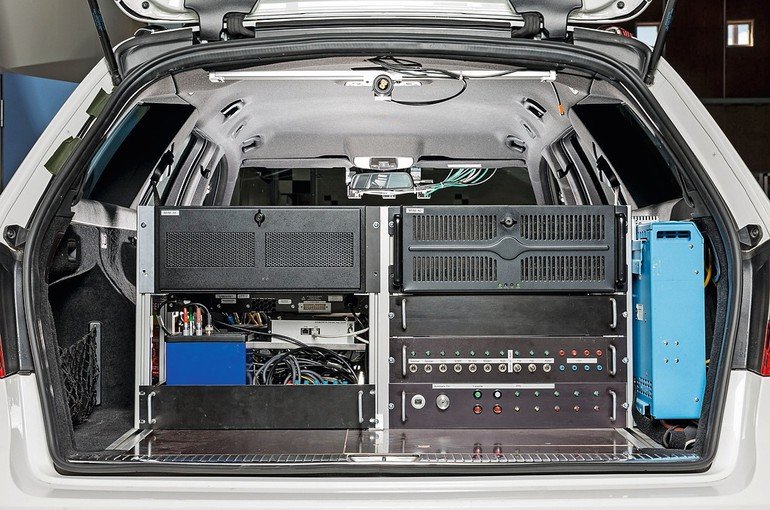
Reuter: Hier geht es um mathematische Ansätze, die Lösungen für das automatisierte Fahren liefern. Um das verkehrssicher zu regeln, muss man wissen, wo sich Fahrzeuge, Fußgänger und alle anderen Verkehrsteilnehmer befinden. Und wir brauchen Informationen, mit welcher Geschwindigkeit sie sich wohin bewegen. Dazu setzen wir mehrere Sensortypen ein: Video, Laser, Radar. Durch die Modellierung mit Random Finite Sets können wir gleichzeitig auch abschätzen, wie sicher das Objekt existiert. Zudem ermöglicht die Methode die Modellierung von Abhängigkeiten im Verhalten der Verkehrsteilnehmer, beispielsweise ob ein vorausschauender Fahrer frühzeitig vom Gas gehen kann.
Heißt das, dass Sensoren manchmal falsche Messungen liefern?
Reuter: In der Tat bekommen wir mitunter Messergebnisse für Objekte, die gar nicht da sind. Auch das Gegenteil passiert: Im Nebel liefern Kameras oft kein Ergebnis für real existierende Objekte. Die angesprochene Methode berechnet für jedes Objekt eine Existenzwahrscheinlichkeit. Je höher sie ist, desto entschiedener wird ein automatisiertes Fahrzeug reagieren.
Wie kommt ein Ingenieur dazu, solche Methoden einzusetzen?
Reuter: Das grundsätzliche Verfahren der Objektverfolgung, der sogenannte Kalman-Filter, ist Bestandteil vieler Ausbildungen. Den Umgang mit Random Finite Sets vermitteln dagegen nur wenige Universitäten auf der Welt, etwa die in Ulm. Zusammen mit zwei Forschern in Australien habe ich eine neue Methode gefunden, die Labeled-Multi-Bernoulli-Filterung, mit der sich die Messwerte mehrerer Objekte mathematisch so rasch berechnen lassen, dass wir in Echtzeit in unseren Versuchsträgern Lösungen bekommen.
Was ist das Ziel?
Reuter: Auf der Autobahn ist die Umgebung überschaubar: Links und rechts haben wir Leitplanken. Die Verkehrsobjekte fahren in der Regel geradeaus. Außer Pkws gibt es fast nur Busse, Motorräder und Lkws. Das heißt: In vielen Fällen braucht man zum automatisierten Fahren lediglich zu wissen, wie schnell der Vordermann gerade fährt. Und das können die bestehenden Tracking-Verfahren sehr gut. Anders sieht es im Stadtverkehr aus. Fußgänger und Fahrradfahrer sind kaum kalkulierbar. Überdies ist dort oft das Blickfeld der Sensoren verdeckt. Das heißt: Messergebnisse und deren einfache Verarbeitung reichen nicht aus, sondern man muss pro Objekt gleich mehrere Messungen vornehmen. Unser Random-Finite-Sets-Tracking berechnet über die zeitliche Abfolge, welche Messungen zusammengehören.
Nach dem, was Sie sagen, wundere ich mich, wieso autonom fahrende Autos bereits zugelassen sind. Der Autohersteller Tesla ist ja nicht nur in den USA gut unterwegs.
Reuter: Tesla nennt das System zwar Autopilot. Doch gemäß der Betriebsanleitung muss der Fahrer das System durchgehend überwachen. Für mich heißt das eindeutig: Auch dort ist man noch nicht beim autonomen Fahren angekommen. Überdies unterscheiden sich Innenstädte in Deutschland hinsichtlich der Verkehrssituation deutlich von den US-Städten: Wir haben engere Straßen, mehr Fußgänger und Fahrradfahrer.
Auch in Deutschland haben viele 1000 Dollar angezahlt, um bald einen schnittigen Tesla 3 zu besitzen. Doch das autonome Fahren im Tesla wäre in Deutschland gesetzeswidrig?
Reuter: Was Tesla unter autonomem Fahren verkauft, bieten deutsche Premiumhersteller auch: Abstandsregeltempomat, Spurhalteassistent, Überholassistent und so weiter. Allerdings fordern die Systeme der deutschen Hersteller häufiger dazu auf, die Hände ans Steuer zu legen. Bei Tesla erfolgt diese Anweisung, insbesondere bei langen Geradeaus-Fahrten, deutlich seltener.
Sie haben inzwischen zwei automatisierte Fahrzeuge am Institut und waren damit auch schon auf der Autobahn unterwegs. Was ist das für ein Gefühl?
Reuter: Bei den ersten Fahrten hat man tatsächlich ein mulmiges Gefühl, wenn der Vordermann bremst und man darauf wartet, ob der eigene Wagen reagiert. Später wird man gelassener. Irgendwann kann man das Fahrzeug einschätzen und weiß, wie es mit einer Situation umgehen wird. Allerdings haben wir uns am Institut bewusst dagegen entschieden, auf der Autobahn zu fahren.
Wieso das?
Reuter: Weil Forscher und Entwickler von Automobilunternehmen bereits viele automatisierte Autobahnfahrten absolviert hatten, als wir das erste automatisierte Auto aufgebaut haben. Als Universitätsinstitut würden wir der Industrie in diesem Bereich nur hinterherlaufen. Deshalb haben wir uns für Fahrten auf Landstraßen und im städtischen Verkehr entschieden.
Mit welchem Ergebnis?
Reuter: Blechschäden haben wir selbstverständlich keine produziert. Natürlich kommt es beim Ausprobieren neuer Algorithmen manchmal zu Fehlfunktionen. Doch das zeichnet sich ab, und der Fahrer kann rechtzeitig übernehmen.
Wo sehen Sie eine Herausforderung?
Reuter: In der „Neuen Mitte“ in Ulm. Das ist ein innerstädtischer Treffpunkt, an dem viele Fußgänger unterwegs sind, die sich gleichberechtigt zum Autoverkehr bewegen: Dort erwarten es die Fußgänger geradezu, dass Fahrzeuge anhalten – nicht nur vor Überwegen. Häufig gibt es Fußgängergruppen, aus denen einer herausbricht und über die Straße geht. Diese Situation muss ein autonomes System verstehen. Es muss jeden einzelnen Fußgänger der Gruppe erkennen. Das Fahrzeug muss sich an diese Situation anpassen – ähnlich wie es ein Autofahrer macht, indem er das Verhalten der Fußgänger im Blick hat und richtig interpretiert.
Menschen beherrschen solche Situationen nur unvollkommen, sonst würde es nicht immer wieder zu Unfällen kommen. Muss ein automatisiertes Fahrzeug tadellos sein oder darf es Fehler machen?
Reuter: Es ist erstaunlich, mit welcher Gelassenheit Menschen Situationen einschätzen und dementsprechend mit ihrem Auto oft zu schnell unterwegs sind. Kaum jemand berücksichtigt im dichten innerstädtischen Treiben, dass ganz unvermittelt ein Radfahrer aus einer Lücke heraus schießen könnte. Autonome Fahrzeuge werden sich zunächst strikt an gesetzliche Vorgaben halten und defensiver unterwegs sein als die meisten Autofahrer. Dadurch kann es vorkommen, dass sie mitunter etwas langsamer fahren, wodurch sich die Lenker nicht automatisierter Wagen behindert fühlen könnten. Sind dann eines Tages alle Fahrzeuge automatisiert, gibt es technische Möglichkeiten, den Verkehr wieder zu verflüssigen. Ein Beispiel hierfür ist das sogenannte Platooning, bei dem Fahrzeuge mit sehr geringen Sicherheitsabständen fahren können. Durch die Verwendung von zusätzlichen Kommunikationseinheiten und einem technischen Steuerungssystem wird die Verkehrssicherheit dabei nicht beeinträchtigt.
Bei immer mehr Elektronik und Software im Auto wächst die Gefahr des Datenmissbrauchs. Werden Hacker-Angriffe zum neuen Problem im Straßenverkehr?
Reuter: Was da auf uns zukommt, ist ein weites Feld. Gerade gibt es eine Ausschreibung des Bundesministeriums für Bildung und Forschung zu IT-Sicherheit und automatisiertem Fahren, an der sich auch unser Institut mit einer Projektskizze beteiligt. Wir wollen untersuchen, wie man verhindert, dass Sensoren von außen gestört werden. Einfaches Beispiel: Eine Kamera kann durch einen starken Scheinwerfer geblendet werden. Anderen Sensoren könnten Objekte vorgegaukelt werden, die gar nicht existieren. Andererseits könnte jemand verfälschte Daten in den Wagen schicken. Hier die Quellen dingfest zu machen und automatisch richtig zu reagieren, ist eine gewaltige Herausforderung.
Gegenwärtig erkennt man zwei Strategien für das automatisierte Fahren. Konventionelle Autohersteller integrieren nach und nach immer mehr Funktionen, um das Auto evolutionär weiterzuentwickeln. Unternehmen wie Google und Apple, die bisher mit Autos nichts am Hut hatten, versuchen, mit revolutionären Produkten Marktanteile zu erobern. Wie beurteilen Sie das?
Reuter: Für die Realisierung von automatisiertem Fahren auf Autobahnen ist die evolutionäre Weiterentwicklung der heutigen Fahrerassistenzsysteme aufgrund der überschaubaren Komplexität eine sinnvolle Herangehensweise. Das automatisierte Fahren im Stadtverkehr unterscheidet sich jedoch sehr stark von den Szenarien, für die heutige Assistenzsysteme optimiert sind. Da bietet es sich folglich an, disruptive Techniken zu untersuchen – also komplett neue Lösungsansätze. Wenn man sich jedoch die Studien und Veröffentlichungen der konventionellen Autohersteller ansieht, erkennt man, dass diese ebenfalls disruptiven Ansätzen nachgehen. Ich sehe deshalb weiter sehr gute Perspektiven für die deutschen Automobilbauer.
Wie lange dauert es, bis echtes autonomes Fahren in deutschen Innenstädten möglich ist? Was schätzen Sie?
Reuter: 10, vielleicht sogar 15 Jahre könnte das schon noch dauern.
Mit Ihren Kenntnissen und Talenten hätten Sie auch in einem Automobilkonzern Karriere gemacht. Was hat Sie bewogen, als Hochschulforscher an der Uni zu bleiben? Mehr Gehalt hätten Sie in der Industrie.
Reuter: Das ist völlig richtig. Im Rahmen meiner Doktorarbeit haben sich jedoch sehr viele neue Forschungsfragen aufgetan, die ich gerne angehen würde. Durch die Position als Juniorprofessor habe ich an der Universität Ulm die Freiheiten, auf diese Forschungsfragen sowie neue Erkenntnisse zusammen mit meinen wissenschaftlichen Mitarbeitern direkt einzugehen.
Sie haben eine Stiftungsjuniorprofessur – die im Normalfall sechs Jahre lang von der Daimler AG finanziert wird. Wie frei sind Sie bei Ihrer Forschung wirklich?
Reuter: Es handelt sich um eine Stelle, die so beschaffen ist wie andere Professorenstellen: Es gibt keinerlei auferlegte Einschränkungen. Klar, dass ich gelegentlich ein zusätzliches Projekt habe, das in Kooperation mit einem Industrieunternehmen läuft. Die Erkenntnisse aus Industrieprojekten werden vor der Veröffentlichung dem Unternehmen vorgestellt und von diesem anschließend freigegeben. Messdaten werden möglicherweise simuliert – also künstlich erzeugt –, damit ein spezifisches Sensor-Knowhow des Auftraggebers nicht nach außen dringt. Doch in jedem Fall dürfen wir die von uns wissenschaftlich erarbeiteten Zusammenhänge an der Universität weiterverwenden. Eine Einschränkung bei der öffentlichen Publikation gibt es weder für mich noch für meine Mitarbeiter.
Spielwiese für die Industrie
Um neue Produktionsformen wie bei „e.Go“ oder „Street-Scooter“ zu realisieren, muss sich die Automobilindustrie stärker vernetzen, meint Produktionsforscher Günther Schuh. Die Grundlage dafür biete der Aufbau eines „Internets der Produktion“. Solche neuartigen Konzepte werden zunächst auf einer realitätsnahen „Spielwiese“ getestet – wie dem Campus der RWTH Aachen, wo derzeit über 300 Unternehmen tätig sind. Die Firmen dürfen sich dort ansiedeln und erhalten eine Art Immatrikulation, ähnlich wie für ein Studium. Damit können die Mitarbeiter der Unternehmen gemeinsam mit Wissenschaftlern forschen, neue Technologien oder Produkte entwickeln und sich weiterbilden. Solche „Orte der Begegnung“ hält Schuh für unverzichtbar, damit Unternehmen üben können, branchenübergreifend zusammenzuarbeiten.
Vita
Stephan Reuter ist seit Mai 2016 Juniorprofessor am Institut für Mess-, Regel-und Mikrotechnik der Universität Ulm. Geboren in Crailsheim, promovierte Reuter (*1981) an der Ulmer Universität. Im Herbst 2016 wurde er ausgezeichnet mit dem „Reinhard von Koenig-Förderpreis“ für seine Forschung an neuen Ansätzen zur Multi-Objekt-Verfolgung in komplexen Szenarien für den Einsatz in autonomen Systemen.
Mehr zum Thema Nachhaltigkeit






 Handball ist als Mannschaftssport bekannt bei dem es auf jeden einzelnen Spieler ankommt. Beim Zerspanen hochkomplexer Bauteile ist das ähnlich. Von der Idee bis zum fertigen Bauteil bedarf es eines guten Zusammenspiels zwischen technischem Vertrieb, Prozessauslegung, Programmierung und Umsetzung an der Maschine.
Handball ist als Mannschaftssport bekannt bei dem es auf jeden einzelnen Spieler ankommt. Beim Zerspanen hochkomplexer Bauteile ist das ähnlich. Von der Idee bis zum fertigen Bauteil bedarf es eines guten Zusammenspiels zwischen technischem Vertrieb, Prozessauslegung, Programmierung und Umsetzung an der Maschine.

 Im Münsterland gibt es über 4.500 Kilometer ausgeschilderte Radwege, die durch malerische Landschaften und charmante Dörfer führen. Fahrradfahren, ob gemütlich oder mit dem Rennrad, ist hier eine beliebte Freizeitbeschäftigung und ein wichtiger Bestandteil des täglichen Lebens – eine Leidenschaft, die wir bei FOOKE mit Begeisterung leben. Mit unserer Leidenschaft für Präzision und Effizienz in der Metallbearbeitung, inspiriert von der Sportlichkeit und Ausdauer des Fahrradfahrens im Münsterland, freuen wir uns darauf, neue Maßstäbe zu setzen und zu zeigen, was mit modernster Technik alles möglich ist.
Im Münsterland gibt es über 4.500 Kilometer ausgeschilderte Radwege, die durch malerische Landschaften und charmante Dörfer führen. Fahrradfahren, ob gemütlich oder mit dem Rennrad, ist hier eine beliebte Freizeitbeschäftigung und ein wichtiger Bestandteil des täglichen Lebens – eine Leidenschaft, die wir bei FOOKE mit Begeisterung leben. Mit unserer Leidenschaft für Präzision und Effizienz in der Metallbearbeitung, inspiriert von der Sportlichkeit und Ausdauer des Fahrradfahrens im Münsterland, freuen wir uns darauf, neue Maßstäbe zu setzen und zu zeigen, was mit modernster Technik alles möglich ist. Unter dem Motto „From Metals to Medals” nehmen die Auszubildenden von Horn auch in diesem Jahr am Wettbewerb teil. Das Team war für die Planung, Budgetierung, Konstruktion und das eigentliche Fertigen des Projekts verantwortlich. Wie im Sport gilt es, Präzision, Durchhaltevermögen und Leidenschaft zu zeigen.
Unter dem Motto „From Metals to Medals” nehmen die Auszubildenden von Horn auch in diesem Jahr am Wettbewerb teil. Das Team war für die Planung, Budgetierung, Konstruktion und das eigentliche Fertigen des Projekts verantwortlich. Wie im Sport gilt es, Präzision, Durchhaltevermögen und Leidenschaft zu zeigen. Die Skulptur verkörpert die Verschmelzung von industrieller Präzision und regionaler Kultur. Sie symbolisiert die Form des Düsseldorfer Radschlägers – einer Figur, die tief in der lokalen Tradition verwurzelt ist. Die Europazentrale in Willich ist unweit entfernt von Düsseldorf. Die Skulptur besteht aus transparentem Plexiglas. Die kreuzähnliche Form ist mit gebrauchten Sumitomo-Tools besetzt. Diese repräsentieren die Verbindung zwischen der Präzision der Metallverarbeitung und der menschlichen Bewegung beim Radschlagen. Im unteren linken Viertel der Figur bildet ein Kreis aus Schneidplatten den Kopf des Radschlägers.
Die Skulptur verkörpert die Verschmelzung von industrieller Präzision und regionaler Kultur. Sie symbolisiert die Form des Düsseldorfer Radschlägers – einer Figur, die tief in der lokalen Tradition verwurzelt ist. Die Europazentrale in Willich ist unweit entfernt von Düsseldorf. Die Skulptur besteht aus transparentem Plexiglas. Die kreuzähnliche Form ist mit gebrauchten Sumitomo-Tools besetzt. Diese repräsentieren die Verbindung zwischen der Präzision der Metallverarbeitung und der menschlichen Bewegung beim Radschlagen. Im unteren linken Viertel der Figur bildet ein Kreis aus Schneidplatten den Kopf des Radschlägers. Die Wahl beim diesjährigen Kunst trifft Technik-Wettbewerb fiel auf eine Hantelstange,
Die Wahl beim diesjährigen Kunst trifft Technik-Wettbewerb fiel auf eine Hantelstange,









{kind=link}