
Für Bearbeitungsprozesse mit vielen Richtungswechseln ist ein schnelles Erreichen der maximalen Achsbeschleunigung für sehr kurze Bearbeitungszeiten ausschlaggebend. Vor allem bei der Fräsbearbeitung von Strukturbauteilen aus Aluminium für die Luft- und Raumfahrt oder Bauteilen mit einer hohen Anzahl an Freiformflächen sind viele dynamische Richtungswechsel erforderlich. Die hierfür eingesetzten Werkzeugmaschinen sind daher mit Lineardirektantrieben ausgestattet, die ein schnelles Erreichen der maximalen Achsbeschleunigung ermöglichen. Der hierfür erforderliche hohe Ruck (zeitliche Änderungen der Achsbeschleunigung) der eingesetzten Lineardirektantriebe führt jedoch zu einer breitbandigen Schwingungsanregung der Maschinenstruktur [ALT11].
Als Folge der Maschinenschwingungen wird die Bearbeitungsqualität potentiell gemindert. Durch Einkoppeln der Maschinenschwingungen über das Wegmesssystem in den Achsregelkreis kann es zudem zu Instabilitäten des Regelkreises und zu einer Zerstörung von Bauteilen kommen [BRE17]. Daher werden als Kompromiss zwischen hoher Achsdynamik und hoher Präzision die Achs-Dynamikparameter wie Beschleunigung, Verzögerung und Ruck heuristisch begrenzt, sodass keine kritischen Maschinenschwingungen entstehen. Allerdings wird durch diese Reduzierung der Achsdynamik das Potenzial von Lineardirektantrieben nicht voll ausgenutzt, sodass die theoretisch erreichbare Produktivität unerreicht bleibt. Zudem resultiert aus der heuristischen Ermittlung der Dynamikparameter ein nicht unerheblicher Zeitaufwand.
Um das Potenzial von Lineardirektantrieben auszunutzen, erforscht das Institut für Fertigungstechnik und Werkzeugmaschinen (IFW) der Leibniz Universität Hannover eine Methode der „aktiven Ruckentkopplung“. Ziel ist die deutliche Steigerung der maximalen Achsdynamik und der erreichbaren Genauigkeit. Der vorliegende Artikel zeigt, wie das Nachgiebigkeitsverhaltens einer Vorschubachse durch die aktive Ruckentkopplung aktiv beeinflusst wird.
Dynamik oder Präzision?
Um Strukturschwingungen zu vermeiden, wird in der Praxis die Sollbahn bzw. Solltrajektorie über die Numerische Steuerung (NC) beeinflusst. Durch geeignete Parametrierung von Tiefpassfiltern und Bandsperren des Antriebsreglers können die schwingungsanregenden Frequenzanteile so aus den Antriebssignalen herausgefiltert werden. Beispielsweise werden Ruckfilter zur Filterung der Lagesollwerte eingesetzt. Die Bandsperre des Ruckfilters wird anhand der bekannten dominanten Resonanzfrequenz des Lageregelkreises parametriert [ALT11, BRE17]. Eine Bandsperre reduziert somit den Ruck bei der spezifischen dominanten Eigenfrequenz der Maschinenstruktur.
Bei der Verwendung eines Tiefpassfilters werden alle Frequenzen oberhalb der parametrierten Frequenz nicht mehr angeregt. Ein wesentlicher Nachteil der sogenannten Stellgrößenfilter ist hierbei die Reduzierung der Störgrößenunterdrückung aufgrund der sinkenden Phasenreserve [ZIR06]. Ein weiterer Nachteil durch das Herausfiltern von Frequenzanteilen aus dem Antriebssignal zeigt sich durch den Vergleich zwischen der Ist- und Solltrajektorie in Form des Schleppfehlers [ZIR06]. Bei erforderlichen hohen Geschwindigkeits- und Beschleunigungsänderungen (z. B. bei gekrümmten Werkstückkonturen) kommt es durch die eingesetzten Stellgrößenfilter zu kritischen Abweichungen zwischen Ist- und Solltrajektorie. Bei engen Radien der Werkstückkontur können aufgrund der Bahnabweichungen die erforderlichen Radien nicht eingehalten werden, sodass die Bearbeitungspräzision gemindert wird. Neben der Filterung der Führungsgrößen kann auch ein ruckbegrenztes Beschleunigungsprofil bzw. ein Siebenphasenprofil zur softwareseitigen Schwingungsminderung angewandt werden.
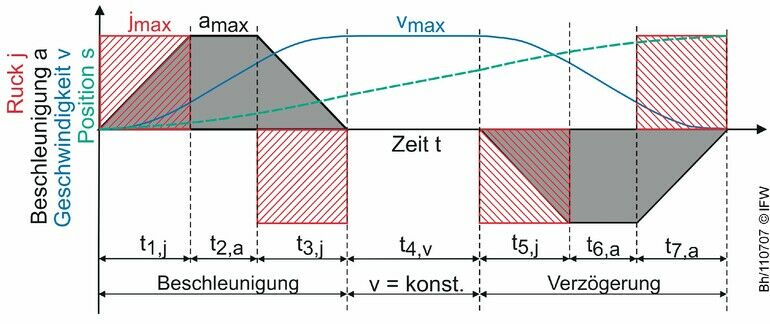
Der Positioniervorgang wird in der NC in sieben Phasen unterteilt um die Sollposition zu erreichen [ERK01]. In Bild 1 ist das entsprechende Bewegungsprofil mit Ruck-, Beschleunigungs- und Geschwindigkeitsverlauf dargestellt. Die Gesamtzeit der Bewegung setzt sich aus den Zeiten für die einzelnen Phasen zusammen. Der maximale Ruck jmax bestimmt hierbei die Zeit, bis die maximale Beschleunigung amax erreicht wird. Je kleiner der eingestellte maximale Ruck, desto stoßfreier erfolgt die Beschleunigung. Damit die dominanten Maschinenschwingungen nicht angeregt werden, wird der maximale Ruck deshalb begrenzt. Als Folge wird wiederum die maximale Achsbeschleunigung langsamer erreicht, sodass auch die Sollposition später erreicht wird. Zudem wird die für die Zerspanung erforderliche Zeitspanne konstanter Verfahrgeschwindigkeit t4,v später erreicht. Für Fertigungsprozesse mit hohen Anforderungen an Präzision und Dynamik sind daher andere Lösungen erforderlich.
Aktive Kompensation der niederfrequenten Schwingungen
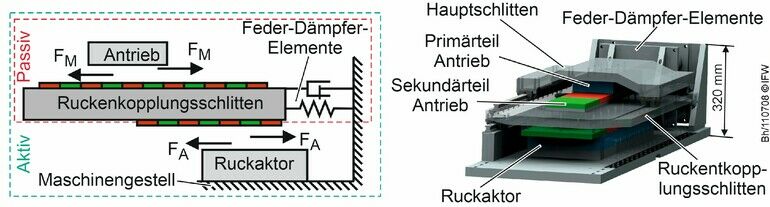
Ein weiterer Ansatz, um die Achsdynamik von Vorschubachsen zu erhöhen und gleichzeitig Maschinenschwingungen zu verringern, ist die Ruck- oder Impulsentkopplung [GÜM14, HES08, MÜL09]. Durch die Integration von Feder-Dämpfer-Elementen und einem wie in Bild 2 dargestelltem zusätzlichen Ruckentkopplungsschlitten zwischen Hauptantrieb und Maschinenstruktur, werden bei der sogenannten passiven Ruckentkopplung die Strukturschwingungen des Maschinengestells reduziert. Bedingt durch die zusätzliche Masse und Strukturnachgiebigkeit, resultiert eine weitere, zweite Resonanzstelle im niederfrequenten Bereich. Dadurch führen jedoch Schwingungen im Bereich der niederfrequenten Resonanzstelle zu einer erheblichen Auslenkung des Ruckentkopplungsschlittens, sodass der Bauraum von passiv ruckentkoppelten Vorschubachse entsprechend groß dimensioniert werden muss.
Des Weiteren klingen im Allgemeinen niederfrequente, in den Ruckentkopplungsschlitten induzierten Schwingungen langsamer ab. Bei Bewegungsprofilen mit vielen Richtungswechseln kann dies im ungünstigen Fall zu einer Überlagerung der Schwingungen und einem instabilen Aufschwingen des Ruckentkopplungsschlittens führen. Eine solche passive Ruckentkopplung stößt daher bei niederfrequenten Schwingungen an seine Grenzen.
Um diese Leistungsgrenze der passiven Ruckentkopplung zu überwinden, wird das neuartige Konzept der aktiven Ruckentkopplung am IFW erforscht. Die aktive Ruckentkopplung erweitert die passive Ruckentkopplung um eine im Kraftfluss zwischen Antrieb und Maschinengestell integrierte Aktorik und Sensorik, ohne dadurch die statische Nachgiebigkeit zu verringern. Hierbei sorgen die Feder-Dämpfer-Elemente in Kombination mit dem Entkopplungs-Schlitten, für die Reduzierung der hochfrequenten Strukturschwingungen des Maschinengestells. Zusätzlich werden die Schwingungen im tieferen Frequenzbereich durch eine modellbasierte Regelung der Kompensationskräfte eines Ruckaktors (Bild 2, links) reduziert.
Um die Eigenschaften und Vorteile aktiv ruckentkoppelter Vorschubachsen zu erforschen, wurde am IFW ein Prüfstand mit integrierter aktiv ruckentkoppelter Vorschubachse nach dem in Bild 2, rechts dargestellten Konzept aufgebaut. Der Versuchsstand ermöglicht den experimentellen Vergleich von aktiver Ruckentkopplung, passiver Ruckentkopplung und einer starren Anbindung des Ruckentkopplungsschlittens an das Maschinengestell. Die starre Anbindung repräsentiert hierbei eine konventionelle, nicht ruckentkoppelte Vorschubachse und somit die Referenz zur späteren Bewertung der Konzepte. Durch den Versuchsstand wird das Potential der Ruckentkopplungskonzepte hinsichtlich der Schwingungsreduzierung, der Positioniergenauigkeit und der Steigerung des maximalen Rucks erforscht. Hierzu werden unterschiedliche Regelalgorithmen wie z. B. Zustandsregler, Modellprädiktive Regler und Ansätze zur robusten Regelung betrachtet.
Präzise positionieren trotz hohen Rucks
Gestellschwingungen des Maschinenbetts wirken sich unmittelbar auf die Positioniergenauigkeit der Vorschubachse aus. Ein wesentlicher Grund hierfür ist das Einkoppeln der Gestellschwingungen in das Wegmesssystem des Hauptschlittens und somit in den Positionsregelkreis des Antriebsreglers. Die Position des Hauptschlittens wird durch einen Linearmaßstab relativ zwischen Hauptschlitten und Maschinenbett gemessen. Schwingungen des Maschinengestells überlagern sich hierbei mit der Verfahrbewegung des Hauptschlittens und wirken als Störgrößen auf den Positionsregelkreis.
Des Weiteren wirken die Gestellschwingungen durch die Reibungseffekte des Führungssystems auf die Positioniergenauigkeit der Vorschubachse. Bei konventionellen Vorschubachsen ohne Ruckentkopplung werden aufgrund der starren Anbindung des Antriebssekundärteils an das Maschinengestell die Gestellschwingungen über die Reibkräfte zwischen Hauptschlitten und Maschinengestell übertragen. Hierdurch wirken die Gestellschwingungen als zusätzliche Störgröße auf den Positionsregelkreis.
Bei der passiven und aktiven Ruckentkopplung wirken sich die Ausgleichsbewegungen des Ruckentkopplungsschlittens über Reibungseffekte zwischen dem Hauptschlitten und dem Ruckentkopplungsschlitten auf die Verfahrbewegung des Hauptschlittens aus. Der Positionsregler kann nicht alle Störeinflüsse kompensieren, sodass es zum Überschwingen an der Sollposition kommt. Das Überschwingen verringert im Bearbeitungsprozess die Bauteilqualität. Zudem erfordert ein langsames Ausschwingen der Positionsüberschwingung eine entsprechende Wartezeit bis die Schwingung für den nächsten Arbeitsschritt hinreichend ausgeklungen ist.
Aufgrund der reibungsinduzierten Rückwirkung des Ruckentkopplungsschlittens auf die Positioniergenauigkeit des Hauptschlittens müssen die Schwingungen des Ruckentkopplungsschlittens verringert werden. Ziel der aktiven Ruckentkopplung ist es daher, das Nachgiebigkeitsverhalten der Maschinenstruktur aktiv in der signifikanten Resonanzstelle der passiven Ruckentkopplung im Bereich zwischen 4 Hz und 10 Hz zu verringern und somit die Gestellschwingungen sowie die Auslenkung des Ruckentkopplungsschlittens zu verringern.
Die Regelkreisstruktur zur modellbasierten Regelung der Aktorkraft FA ist in Bild 3 dargestellt. Grundlage der modellbasierten Regelung ist ein mathematisches Mehrkörpermodell des dynamischen Schwingverhaltens der Maschinenstruktur. Die dominanten Starrkörperschwingungen resultieren aus Schwingungen des Maschinengestells bzw. des Maschinenbetts und des Ruckentkopplungsschlittens in X-Richtung. Das strukturdynamische Verhalten der Vorschubachse wird daher in X-Richtung als Zwei-Massen-Schwinger mit der Masse des Maschinengestells mG und der Masse des Ruckentkopplungsschlittens mREK mit den entsprechenden Steifigkeiten kG und kREK und den Dämpfungsparametern dG und dREK vereinfacht. Die Schwingungen setzen sich somit aus der Auslenkung des Freiheitsgrads des Maschinengestells XG und der Auslenkung des Freiheitsgrads des Ruckentkopplungsschlittens XREK zusammen.
Der Achsregler sowie der Schwingungsregler sind innerhalb eines Beckhoff-Systems über eine Twincat-Steuerung umgesetzt. Die Regelung des Antriebs erfolgt anhand einer NC-Task (Bild 3, Task 1) als Kaskadenregler. Die Sollbahn Xsoll wird, basierend auf den Dynamikparametern Soll-Ruck, Soll-Beschleunigung Soll-Geschwindigkeit und Soll-Position, errechnet und dem Kaskadenregler zugeführt. Als Folge der Positionierung wird die Maschinenstruktur durch die Reaktionskraft FM des Antriebs zu Schwingungen angeregt.
Die Schwingungen werden durch einen auf dem Ruckentkopplungsschlitten applizierten Beschleunigungssensor erfasst. Im Reglertask des Schwingungsreglers (Bild 3, Task 2) erfolgt zunächst eine Signalaufbereitung des Beschleunigungssignals. Ein Zustandsbeobachter schätz auf Grundlage des vereinfachten Mehrkörpermodells, dem gefilterten Beschleunigungssignal und der Motorkraft des Antriebs die dominanten Schwingungen der Maschinenstruktur. Anhand eines modellbasierten Reglers GR wird die erforderliche Soll-Aktorkraft FA,soll zur Kompensation der Strukturschwingungen berechnet. Die Regelung der hierfür erforderlichen Aktorströme erfolgt wiederum im NC-Task (Task 1) anhand eines umgesetzten Stromreglers.
Durch die verwendete Reglerstruktur kann der Ruckaktor als zusätzlicher Antrieb im Beckhoff-System problemlos verwendet werden. Der Regelalgorithmus zur Schwingungskompensation in Task 2 ist hierbei als SPS-Code umgesetzt. Die Synthese des Reglers GR erfolgt in Matlab/Simulink unter Berücksichtigung nichtlinearer Störeffekte wie Reibung, der Aktordynamik und der Rückwirkung der Schwingung des Maschinengestells auf den Achsregler durch den Linearmaßstab. Der synthetisierte und getestete Regler wird anhand einer automatischen Codegenerierung in einen für die Twincat-Steuerung verständlichen SPS-Quellcode umgewandelt.
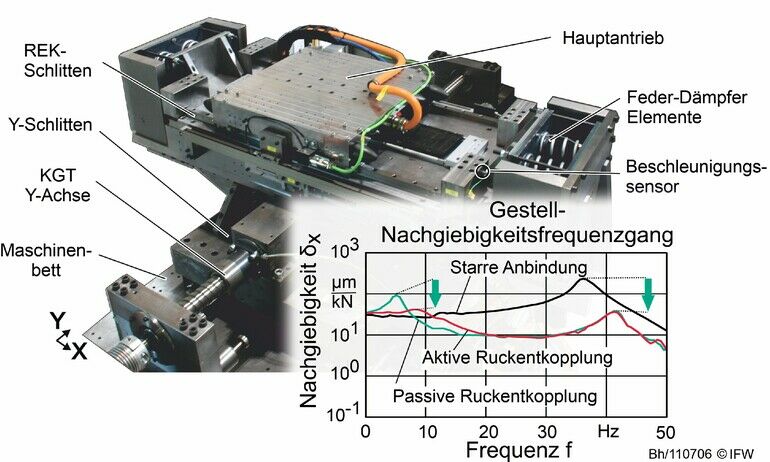
Durch einen aktiv ruckentkoppelten Kreuztisch-Versuchsstand (Bild 4) wurde die Wirkungsweise der aktiven Ruckentkopplung erfolgreich nachgewiesen. In Bild 4 ist das entsprechende frequenzabhängige Nachgiebigkeitsverhalten des Maschinegestells in Vorschubrichtung X durch den Nachgiebigkeitsfrequenzgang dargestellt. Durch das Tiefpassverhalten der passiven Ruckentkopplung wird die maximale dynamische Nachgiebigkeit des Maschinengestells bei 38 Hz von δX = 250 µm/kN auf 50 µm/kN um 80 % reduziert. Die durch die passive Ruckentkopplung entstandene zusätzliche Resonanzüberhöhung im tiefen Frequenzbereich liegt bei fREK = 5 Hz. Durch den Einsatz der neuen aktiven Ruckentkopplung wird die entstandene Resonanzüberhöhung bei 5 Hz von δX = 100 µm/kN auf 50 µm/kN, d. h. um 50 % reduziert und auf einen Wert von 8 Hz verschoben. Als Folge führen auch niederfrequente Kraftanregungen durch den Hauptantrieb zu keiner systemkritischen Auslenkung aufgrund der Resonanzüberhöhung von Maschinengestell und Ruckentkopplungsschlitten.
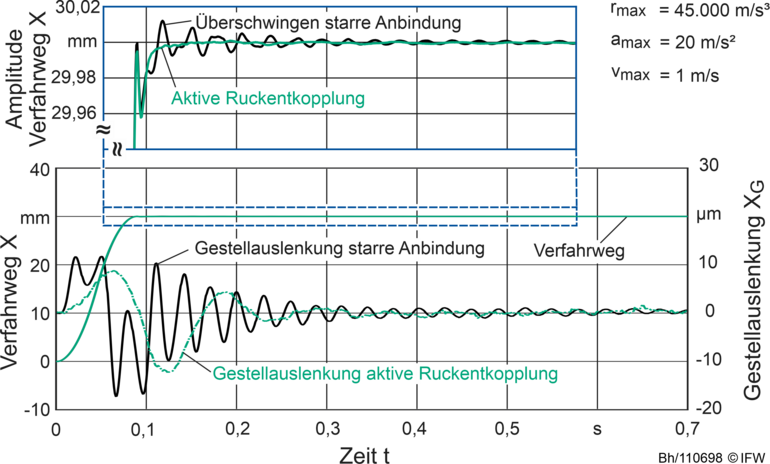
Das weitere Potenzial des Ansatzes der aktiven Ruckentkopplung ist anhand des Positionierverhaltens bei einem definierten Positioniersprung ersichtlich. Dafür wurde das Positionierverhalten nach einem Positionssprung mit einem Verfahrweg von ∆X = 30 mm gemessen. Dabei ist der maximale Ruck auf 45 000 m/s3 bei einem trapezförmigen Beschleunigungsprofil (amax = 20 m/s2 und vmax = 1 m/s) begrenzt. Der maximal realisierbare Ruck des Lineardirektantriebs berechnet sich hierbei aus der Zwischenkreisspannung von 600 V und der spezifischen Kraftkonstante von 38 N/A bei einer Stranginduktivität von 2,4 mH und einer Masse des Hauptschlittens von 80 kg zu 48 500 m/s3. Bereits ein Ruckwert von über 45 000 m/s3 führt bei der starren Anbindung zu einem instabilen Positioniervorgang.
In Bild 5 ist die mittels Laservibrometer gemessene Auslenkung des Maschinengestells XG über der Zeit dargestellt. Es zeigt sich, dass die maximale Auslenkung des Maschinengestells bei aktiver Ruckentkopplung im Vergleich zur starren Anbindung um 39 % geringer ist (von XG = 18 µm auf 11 µm). Zudem ist die Ausschwingzeit des Gestells bei aktiver Ruckentkopplung gegenüber der starren Anbindung um 42 % verkürzt (von 0,38 s auf 0,22 s).
Die Auswirkungen der Strukturschwingungen auf die Positioniergenauigkeit des Antriebs sind anhand des Überschwingens des Verfahrwegs um die Sollposition erkennbar (Bild 5, oben). Bei der starren Anbindung resultiert eine Überschwingung mit einer Amplitude von 10 µm. Aufgrund der Wechselwirkung mit dem Antriebsregler klingt die Schwingung erst bei ca. 0,28 s ab. Bei der aktiven Ruckentkopplung resultiert eine Überschwingung von 0,5 µm, die bereits nach 0,05 s abklingt. Nach 0,13 s wird die Zielposition innerhalb eines Toleranzbands von 0,5 µm erreicht.
Für Anwendungsfälle in denen es auf eine hohe Präzision bei gleichzeitig hoher Achsdynamik ankommt, zeigt die aktive Ruckentkopplung somit entscheidende Vorteile. Durch ein im Vergleich zur starren Anbindung um 95 % verringertes Überschwingen erhöht sich bei der aktiven Ruckentkopplung die Positionier- und Bahngenauigkeit potentiell deutlich. Der maximale Ruck des Antriebs kann somit a priori auf einem hohen Wert eingestellt werden. Für die Anwendung in der Werkzeugmaschine bedeutet dies, dass ein aufwendiges experimentelles Ermitteln eines geeigneten Kompromisses aus vertretbarer Antriebsdynamik und Bauteilqualität nicht mehr notwendig ist.
Wirtschaftlicher Vorteil
Der wirtschaftliche Vorteil hinsichtlich der Erhöhung des maximalen Rucks durch die aktive Ruckentkopplung kann beispielhaft anhand des in Bild 5 dargestellten Punkt-zu-Punkt (PtP) Positioniervorgangs gezeigt werden. Wird zunächst ein für die HSC-Bearbeitung üblicher Ruckwert von 100 m/s3 herangezogen, resultiert bei einem trapezförmigen Beschleunigungsprofil (amax = 20 m/s2 und vmax = 1 m/s) für den Positionssprung von X = 30 mm eine Positionierzeit von 280 ms. Bei einem Ruckwert von 45 000 m/s3 wird die Zielposition hingegen rechnerisch nach 78 ms erreicht.
Wird der Einschwingvorgang bei der aktiven Ruckentkopplung berücksichtigt, ergibt sich nach Bild 4 eine Positionierzeit von 130 ms. Der Positioniervorgang mit aktiver Ruckentkopplung und einem Ruck von 45 000 m/s3 ist somit um 54 % kürzer als bei einer Werkzeugmaschine mit konventionellem Ruckwerten von 100 m/s3. Bei der Herstellung von Bauteilen mit z. B. sich wiederholendem Bohrmuster, ergibt sich bei 100 000 identischen Positioniervorgängen eine Zeitersparnis von mehr als vier Stunden.
Ziel zukünftiger Forschung ist die Evaluierung der Entkopplungs-Maßnahmen im Rahmen von Zerspanuntersuchungen innerhalb einer Werkzeugmaschine. Hierbei werden auch Methoden zur autonomen Parametrierung der aktiven Ruckentkopplung erforscht. Durch eine autonome Parametrierung des Entkopplungssystems soll die Inbetriebnahme vereinfacht werden, sodass die aktive Ruckentkopplung ohne spezielle regelungstechnische Expertise implementiert werden kann.
Danksagung
Das Forschungsprojekt „Aktive Ruckentkopplung für Werkzeugmaschinen“ (Projektnummer: 269666724) wird mit Mitteln der Deutschen Forschungsgemeinschaft (DFG) gefördert. Das IFW bedankt sich für die finanzielle Unterstützung in diesem Projekt.
Institut für Fertigungstechnik und Werkzeugmaschinen (IFW) der Leibniz Universität Hannover
www.ifw.uni-hannover.de
Die Autoren
Prof. Dr.-Ing. Berend Denkena, Institutsleiter, Dipl.-Ing. Heinrich Klemme, Leiter des Bereichs Maschinen und Steuerungen, M. Sc. Marcel-Frederic Böhse, wissenschaftlicher Mitarbeiter, Institut für Fertigungstechnik und Werkzeugmaschinen (IFW) der Leibniz Universität Hannover.
Literaturverzeichnis
[ALT11] Altintas Y, Verl A, Brecher C, Uriarte L, Pritschow G (2011) Machine tool feed drives. CIRP Annals 60(2):779–796.
[BRE17] Brecher C, Weck M (2017) Werkzeugmaschinen Fertigungssysteme. Springer Berlin Heidelberg, Berlin, Heidelberg.
[ERK01] Erkorkmaz K, Altintas Y (2001) High speed CNC system design. Part I: jerk limited trajectory generation and quintic spline interpolation. International Journal of Machine Tools and Manufacture 41(9):1323–1345.
[GÜM14] Gümmer O (2014) Produktivitäts- und Genauigkeitssteigerung von Fräsmaschinen durch ruckentkoppelte Vorschubantriebe und magnetische Führungseinheiten, Dissertation, Garbsen, Leibniz Universität Hannover, Institut für Fertigungstechnik und Werkzeugmaschinen.
[HES08] Hesse P (2008) Energieeffizientes Relativführungskonzept für ruckentkoppelte Vorschubachsen, Dissertation, Garbsen, IFW, Institut für Fertigungstechnik und Werkzeugmaschinen.
[MÜL09] Müller J (2009) Vergleichende Untersuchung von Methoden Vergleichende Untersuchung von Methoden zur Verringerung der Gestellanregung durch linearmotorgetriebene Werkzeugmaschinenachsen, Dissertation, Dresden, Technische Universität Dresden, Institut für Werkzeugmaschinen und Steuerungstechnik.

















{kind=link}