


Während sich bei den Werkzeugmaschinen mit der DIN 66025 eine einheitliche Programmiersprache durchgesetzt hat, kämpft man bei den Robotern mit einem babylonischen Sprachwirrwar. Gerade wenn Werkstücke von Bearbeitungszentren an den Roboter weitergereicht werden, ist das eine Herausforderung. Die Brücke baut eine Steuerungslösung, die ohne herstellerspezifische Robotersprache im Wesentlichen mit der Hochsprache oder der NC-Sprache nach DIN 66025 auskommt.
Industrieroboter sind vielseitige Produktionshelfer: Ihre Einsatzbereiche werden häufig begrenzt durch die Komplexität ihrer Programmierung und die Frage, ob diese Programmierung in Bezug auf die produzierten Mengen wirtschaftlich ist. Der Einsatz von Playback- und Teach-In-Verfahren haben den Robotereinsatz in vielen Fällen vereinfacht. Wo die Anlernverfahren jedoch wegen der Komplexität der Aufgabe an ihre Grenzen stoßen und auch die CAD-gestützte Programmierung nicht realisierbar oder zu teuer ist, wird textuell programmiert. Eine einheitliche Standard-Programmiersprache für Roboter ist nicht in Sicht – jeder Hersteller setzt auf eigene Idiome, die sich sowohl im Sprachumfang als auch in der Syntax und Semantik unterscheiden. Oft unterscheiden sich die herstellerspezifischen Sprachen selbst innerhalb der Sortimente nach Robotertypen. Spezialisten sind für die Programmierung gefragt – eine Anforderung, die insbesondere kleine und mittelständische Unternehmen auf eine Probe stellt.
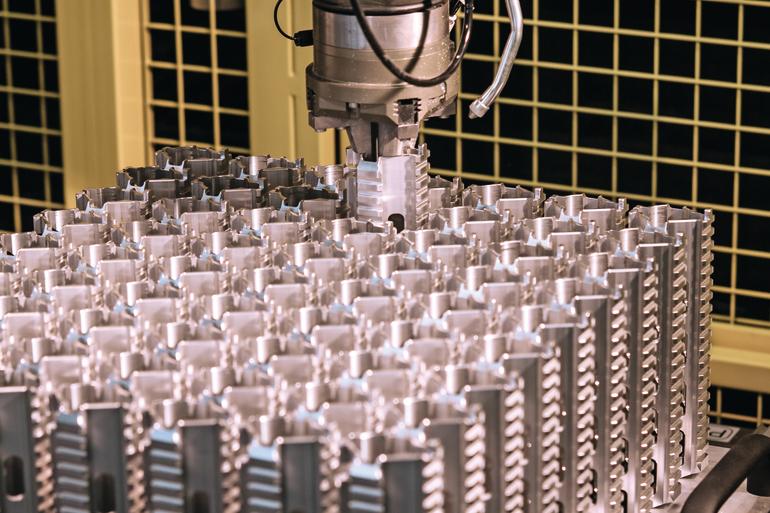
Es ginge auch anders, wie ein Fallbeispiel des Oberndorfer Steuerungsspezialisten BWO beweist, bei dem ein komplexes Aluminiumfrästeil entgratet wird. Der Vorteil: Die Kontur des Werkstücks ist im NC-Programm der Fräsmaschine bereits vorhanden. Generell könnten alle Bewegungsabläufe, Geschwindigkeits- und Beschleunigungsangaben sowie Anweisungen mit der DIN 66025 gelöst werden. Für komplexe Berechnungen und Abläufe wie das Palettieren der Werkstücke wird die Hochsprache C++ eingesetzt. So kann ein Programmierer ohne Kenntnisse der Roboter-Programmiersprache in der für ihn bekannten PC-Hochsprache oder in NC-Sprache nach DIN 66025 sein Programm erzeugen – dies reduziert den Aufwand für die Einarbeitung und verringert die Komplexität der Programmierung in einer Fertigungslinie.
Das Problem mit dem Entgraten stellt sich in vielen Fertigungsprozessen: Im Vergleich zur Basisfertigung eines Werkstücks ist das Entgraten ein anspruchsvoller zusätzlicher Arbeitsgang. Während Fräsen oder Drehen aus dem vollen Material geschieht, geht es beim Entgraten darum, einen nicht genau definierten Nebeneffekt abzutragen, ohne die in der CNC-Produktion hart erkämpfte Maßhaltigkeit des Werkstücks und seine Oberflächen zu beeinträchtigen. Gleichzeitig ist das Entgraten ein Flaschenhals in einer Produktionsfolge, für die keine teure Werkzeugmaschine belegt werden soll. Abhängig von Mengen und Zeitgerüsten wird deshalb auch heute noch häufig händisch abrasiv mit Bürsten, Feilen oder Schleifmitteln entgratet. Das ist eine belastende, weil stumpfsinnige und anstrengende Arbeit, die von den typischen Begleiterscheinungen menschlicher Arbeit belastet ist: Tagesform, Schichtarbeit, urlaubs- und krankheitsbedingte Ausfälle.
Manuell oder per Roboter entgraten?
Im Beispielfall soll ein komplexes Werkstück mit dem Roboter überarbeitet werden, das bislang händisch entgratet wurde. Es geht um den Aluminium-Handschutz eines Gewehrs, ein Hohlprofil, das mit verschiedenen Montagebohrungen und Ventilationsöffnungen versehen ist und an allen vier Seiten sogenannte Picatinny-Nuten trägt. Dieses genormte Picatinny-Profil wird dazu verwendet, Zusatzbauteile wie Leuchten, Zieloptiken oder Handgriffe am vorderen Schaft des Gewehrs zu befestigen. Ein gut eingearbeiteter Mitarbeiter benötigt für die manuelle Entgratung des Bauteils rund 20 Minuten. Dabei kommen Feilen, Drahtbürsten und Schleifpapier zum Einsatz.
Die besondere Herangehensweise an das Projekt erfordert die Verwendung einer speziellen Steuerung – zum Einsatz kommt eine BWO/Vektor des Oberndorfer Steuerungsspezialisten BWO. Die Steuerung ermöglicht die Verwendung der Hochsprache oder der Syntax der DIN 66025. Auch können die notwendigen Programmteile aus dem NC-Programm der Werkzeugmaschine für das NC-Programm des Roboters genutzt werden. Das spart erheblichen Programmieraufwand, da diese Daten aus der Vorfertigung vorliegen. Dabei kann die Programmierung offline am PC erfolgen oder auch direkt an der Bedieneinheit der Steuerung.
In beiden Welten zuhause
Die verwendete Steuerung ist in beiden Welten zuhause und kann sowohl Werkzeugmaschinen als auch Industrieroboter steuern – deshalb kann sie auch CNC-Programme nach DIN 66025 direkt abarbeiten. Die Befehle, die unter anderem dazu dienen, das Verhalten des Roboterarms im Raum zu beschreiben, können je nach Anwendung in DIN 66025 oder in einer objektorientierten Variante der Programmiersprache C realisiert werden. C++ gehört zu einer der verbreitetsten Programmiersprachen überhaupt. Wobei hier auch die Kenntnisse in C oder Java ausreichend wären. Das bedeutet für den Anwender: Statt sich über die Programmiersprache eng an einen speziellen Roboterproduzenten zu binden, öffnet diese Lösung Freiräume. Personaleinsatz und Programmierung werden flexibler – viele Programmieraufgaben können inhouse auch ohne Spezialisten für die Roboter-Programmiersprache gelöst werden.
Nach einem elfminütigen Gesamtprozess – also neun Minuten Gewinn im Gegensatz zur Handarbeit – legt der Roboterarm das Werkstück auf eine andere Palette mit den fertigen Teilen und kann den nächsten Handschutz bearbeiten. Die Daten aus der Werkzeugmaschine müssen nicht über einen Postprozessor in eine Roboter-Programmiersprache umgewandelt werden, es entsteht kein Datenverlust durch Umwandlungen und keine zusätzliche Software ist notwendig. Viele Standard-Programmanwendungen werden als Module mit der Steuerung mitgeliefert und können schnell auf spezifischen Bedarf angepasst werden.
Die hier verwendete integrierte Steuerung ist durch acht Kanäle multitaskingfähig, kann also mehrere Steuerungsaufgaben gleichzeitig verrichten. Sie kann sogar eine Werkzeugmaschine und einen Industrieroboter parallel steuern. Die Bedienung und ggf. auch die Programmierung erfolgen dabei am Handbedienfeld des Roboters oder der kompakten Steuerung BWO/Vektor der Werkzeugmaschine in der gewohnten NC-Programmierung. Für den Roboter ist kein zusätzliches Steuerungssystem erforderlich. Dies ist besonders interessant, da Roboter immer häufiger direkt in die Maschinen und Fertigungsanlagen integriert werden. Hier bringt ein einheitliches System entscheidende Vorteile, wie z. B. die exakte Synchronisierung der Achsen für die hohen Anforderungen an die Genauigkeit oder auch einen geringeren Aufwand bei Inbetriebnahme und Instandsetzung. Zudem entsteht kein Leistungsverlust in der Kommunikation zwischen zwei Steuerungen. Dabei kann der Roboter nicht nur für Be- und Entladung genutzt werden, sondern auch für komplexe Bearbeitung.
BWO Elektronik GmbH www.bwo-elektronik.de
Teilen:


















{kind=link}